JavascriptがOFFのため正しく表示されない可能性があります。
MMSlineup
計測サービス
ギャラリーサイト
会員サポート
お問い合わせ
お問い合わせ
MMS lineup
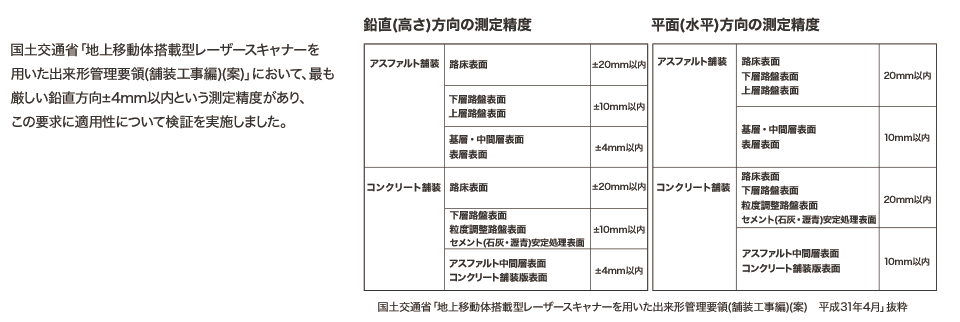
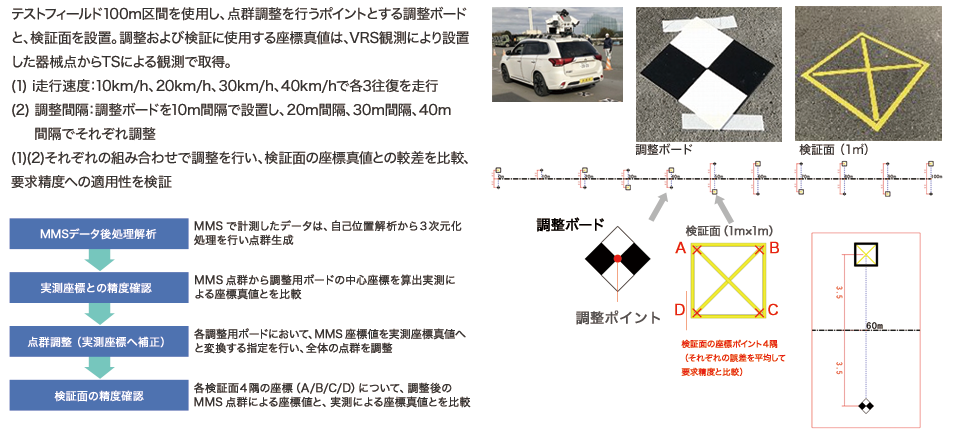
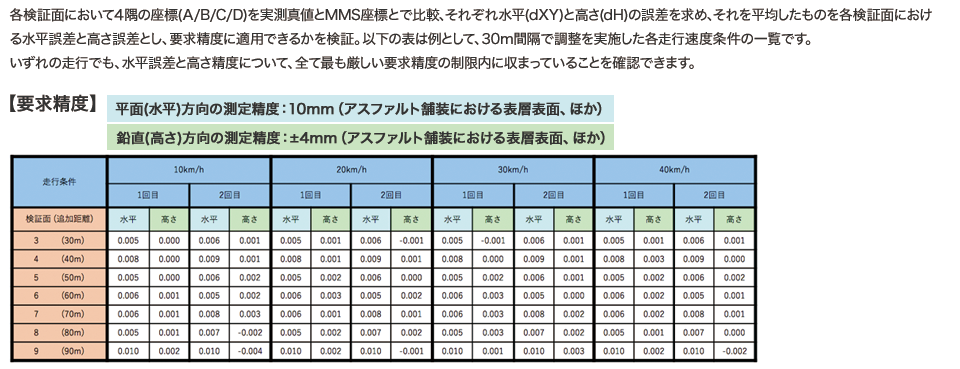
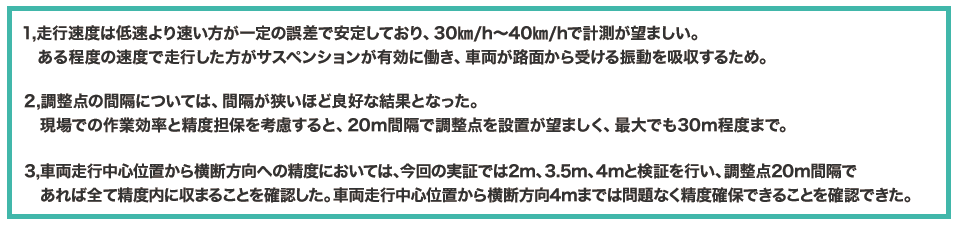
ICT舗装工への精度適用性検証
MMSlineupへ